В данном разделе можно познакомиться с характеристиками и применением промышленного контроллера МПСУ (ПК МПСУ). Приведённая здесь информация может повторять то, что приведено в документах на нашем сайте в разделе «Промышленные контроллеры СКБ ВТ».
Повторение сведений связано с тем, что при подготовке к 35-летию СКБ ВТ было решено опубликовать на нашем сайте наиболее полную информацию по МПСУ, поскольку это изделие определяло одно из основных направлений нашей работы.
1 Краткое описание МПСУ
Промышленный контроллер МПСУ (микропроцессорная система управления) различных модификаций применяется для решения задач промышленной автоматизации в энергетике, различных отраслях промышленности, на железнодорожном транспорте и так далее. МПСУ по условиям эксплуатации удовлетворяет требованиям группы 2 по ГОСТ 21552-84.
ПК МПСУ имеет конструкцию, включающую каркас модулей (КМ) с источником питания и установленными в КМ модулем процессора (контроллера МПСУ) и модулями УСО. В основе МПСУ заложен магистрально-модульный принцип, позволяющий легко осуществить конфигурирование системы под конкретную задачу, выбирая состав аппаратных модулей из обширной существующей номенклатуры. Взаимодействие модулей системы в каркасе осуществляется по межмодульному параллельному интерфейсу QBUS (МПИ ГОСТ 26 765.51-86). Модули имеют фронтальное расположениевнешних разъемов типа РП15-32, РП15-15, РП15-9, DB9, DB25. Подробные сведения о конструкции, назначении и технических характеристиках конкретных модулей приведены в разделе Технические характеристики аппаратных средств МПСУ, а также в паспортах и ТУ на модули. Каждый модуль УСО имеет свой набор адресов внешнего устройства, рекомендации по применению модулей приводятся в паспортах.
Каркас модулей КМ8 имеет встроенный «охранный таймер».
ПК МПСУ предназначен для построения различных комплексов аппаратно-программных средств при создании АСК, АСУТП и прочих систем. На базе МПСУ также создаются различные устройства и приборы. Могут быть использованы различные схемы включения МПСУ в структуру комплекса наряду с оборудованием различных производителей, а также разный состав модулей внутри МПСУ (с применением, возможно, внешних преобразователей измеряемых или управляющих сигналов). Использование МПСУ как средства для создания ПТК (программно-технических комплексов)подробно рассмотрено на соответствующей странице.
Программное обеспечение МПСУ включает различные системы программирования, тестовое обеспечение, программы связи с верхним уровнем по последовательным и параллельным каналам связи, а также фирменный протокол обмена МПСУ (для контроллеров М251…М255)
2 Основные характеристики устройств МПСУ
2.1 Каркасы модулей (КМ)
Наиболее часто применяемым каркасом модулей в системах на базе МПСУ является КМ8. В то же время МПСУ может выпускаться с каркасами КМ19 (19 модулей) и КМ13 (13 модулей).


КМ8 предназначен для одновременного размещения и подключения до восьми функциональных одноплатных устройств (модулей) и встроенного устройства питания с панелью управления
Технические характеристики:
- Габаритные размеры каркаса………………………………………………..220 х 185 х 378 мм
- Масса с устройством питания не более…………………………………….10 кГ
- Первичное напряжение………………………………………………. ~ 220В, 50Гц
- Вторичные напряжения………………………………… +5 В +-5%, +12 В+-5% и минус 12 В+-5%
- Макс. значения токов нагрузки: «канал + 5 В» — 8 А ; «канал +12 В» — 2 А ; «канал -12 В» — 2 А
- Макс. мощность нагрузки……………………………………………………45 вт
- Устройство питания имеет защиту от перегрузки и короткого замыкания, защиту от превышения выходного напряжения
- Мощность, потребляемая устройством от сети в режиме номинальной нагрузки не более 150 ВА
- Имеется встроенный «охранный таймер»
2.2 Контроллеры (CPU)
Одноплатный контроллер, предназначенный для установки в каркас МПСУ. Выпускается в двух модификациях: модификация М252 отличается наличием параллельного интерфейса
Технические характеристики:
- Габаритные размеры контроллера (одинаковые для одноплатных модулей)…262x175x20 мм
- Масса не более ……………………………………………………………………0,4 кГ
- Тип микропроцессора……………………………………………………………..1806 ВМ2
- Система команд совместима с системой команд микро-эвм «Электроника МС 1201.02» (DEC)
- Разрядность: 16 бит; ёмкость памяти: 56 Кбайт; адресное пространство: 64 Кбайт (user) + 64 Кбайт (halt)
- Распределение адресного пространства между ОЗУ и ПЗУ производится при помощи движковых переключателей
- Внешние последовательные интерфейсы (каналы связи):.2 канала ИРПС (20 мА «токовая петля»)
- Другие каналы связи: модуль М252 имеет параллельный интерфейс по типу однонаправленного LPT
- ПЗУ с ультрафиолетовым стиранием, запись программ не внешнем программаторе
- Программное обеспечение: встроенное ПО (пультовая программа, резидентные тесты, загрузчики, супервизор УСО) хранится в ПЗУ, различные системы программирования, операционная система RT-11 (RAFOS), протокол обмена с МПСУ, драйвер связи с системой «Круг2000/NT»

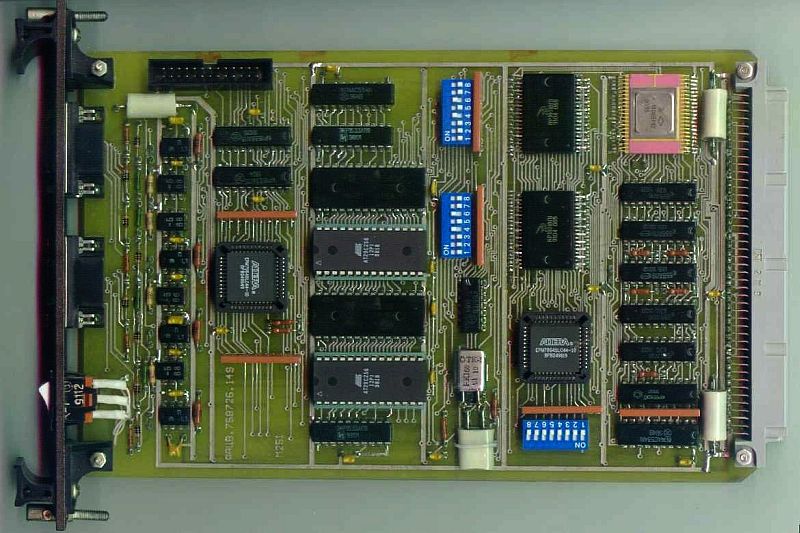
Одноплатный контроллер МПСУ. Выпускается в трёх модификациях, отличающихся набором внешних интерфейсов, является развитием линейки контроллеров на микропроцессоре 1806 ВМ2. По сравнению с контроллером М251, М252 имеет более высокое быстродействие (на 25%), а также дополнительные типы внешних интерфейсов.
Технические характеристики:
- Масса не более ……………………………………………………..……………0,6 кГ
- Тип микропроцессора……………………………………..……………………..1806 ВМ2
- Внешние интерфейсы :
|
М253
|
М254
|
М255
|
|
| Интерфейс RS-232 |
1
|
2
|
2
|
| Интерфейс RS-232 / RS-485 |
1
|
нет
|
нет
|
| Параллельный интерфейс (двунаправленный LPT) |
1
|
1
|
нет
|
| ИРПС «20 мА токовая петля» |
1
|
1
|
1
|
- ПЗУ на микросхемах флэш-памяти, запись программ непосредственно в модуле по терминальному каналу
- Распределение адресного пространства между ОЗУ и ПЗУ производится при помощи движковых переключателей
- Программное обеспечение: встроенное ПО (пультовая программа, резидентные тесты, загрузчики, супервизор УСО, программа записи во флэш-память) хранится во флэш-ПЗУ; различные системы программирования; операционная система RT-11 (RAFOS); тестовое обеспечение для проверки каналов связи, протокол обмена с МПСУ, драйвер связи с системой «Круг2000/NT»
Данные контроллеры открывают линейку контроллеров МПСУ, совместимых с IBM PC.
Контроллер МПСУ М260 представляет собой плату-адаптер, в которую устанавливается плата (модуль микроконтроллера) CPU188-5 фирмы Fastwel(используется версия CPU не ниже V3). Соответственно технические характеристики определяются именно данной платой CPU. Перечень характеристик и подробное описание платы CPU188-5, а также руководство пользователя содержатся в документации, подготовленными фирмой ProSoft.
Модуль М260 включает в себя адаптер шинных интерфейсов ISA / QBUS и обеспечивает управление шиной QBUS каркаса модулей МПСУ.
Основные технические характеристики , обеспечиваемые платой CPU188-5 :
- Наличие универсального порта дискретного ввода/вывода (48 линий), на основе которого организуется параллельный двунаправленный канал связи по типу LPT (8 разрядов дискретных данных)
- Наличие двух стандартных встроенных последовательных портов:
- COM1 с интерфейсом RS-232 или RS-485 (изолированный)
- COM2 с интерфейсом RS-232 или RS-422 (изолированный), или RS-485 (изолированный)
- Наличие встроенной операционной системы ROM DOS, совместимой с MS DOS 6.22, и встроенного программного обеспечения ROM BIOS (Fastwel), построенное по аналогии с BIOS IBM PC. Операционная система ROM DOS и ROM BIOS располагаются во Flash памяти FFD, имеющей файловую организацию, что позволяет в неё также записывать произвольные программы
- Программное обеспечение контроллера включает также программы обмена с компьютером по каналам связи, супервизор модулей УСО, программы комплексного тестирования
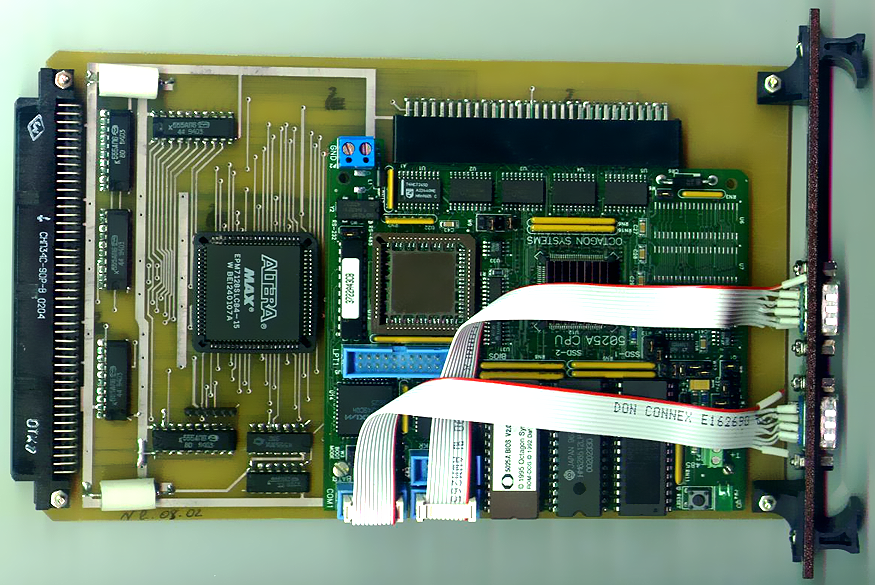
Контроллер МПСУ М260.01 представляет собой плату-адаптер, в которую устанавливается плата (CPU card) 5025A-486-25 MHz-4MB фирмы Octagon Systems (или плата 5025A-386-25 MHz). Соответственно технические характеристики определяются данной платой МикроРС. Перечень характеристик и подробное описание CPU, а также руководство пользователя содержатся в документации на МикроРС.
Модуль М260.01 включает в себя адаптер шинных интерфейсов ISA / QBUS и обеспечивает управление шиной QBUS каркаса модулей МПСУ. Кроме платы процессора и кабелей-шлейфов, модуль М260.01 не отличается от модуля М260.
Основные технические характеристики , обеспечиваемые платой МикроРС 5025А :
- Имеется встроенная операционная система ROM DOS, совместимая с MS DOS 6.22, и встроенное программное обеспечение ROM BIOS, построенное по аналогии с BIOS IBM PC. Операционная система ROM DOS и ROM BIOS располагаются на логическом диске SSD0, который имеет файловую организацию
- Имеется динамическое ОЗУ (DRAM), объём ОЗУ составляет от 4 до 8 Мбайт
- Для записи программ пользователя предназначен логический диск SSD1. Физически SSD1 может представлять собой флэш-память объёмом до 512 Кбайт или энергонезависимую память типа EPROM объёмом до 1 Мбайта. Флэш-память SSD1 может программироваться с компьютера по последовательному терминальному каналу
- Имеются два стандартных встроенных последовательных порта:
- COM1 с интерфейсом RS-232
- COM2 с интерфейсом RS-232 (переключается на RS-485 или на RS-422)
- Имеется параллельный порт LPT1 (17 цифровых линий ввода/вывода)
В обоих модификациях модуля каналы связи выведены на внешние панели, в том числе дополнительную, поэтому при установке в МПСУ контроллер занимает 2 места.
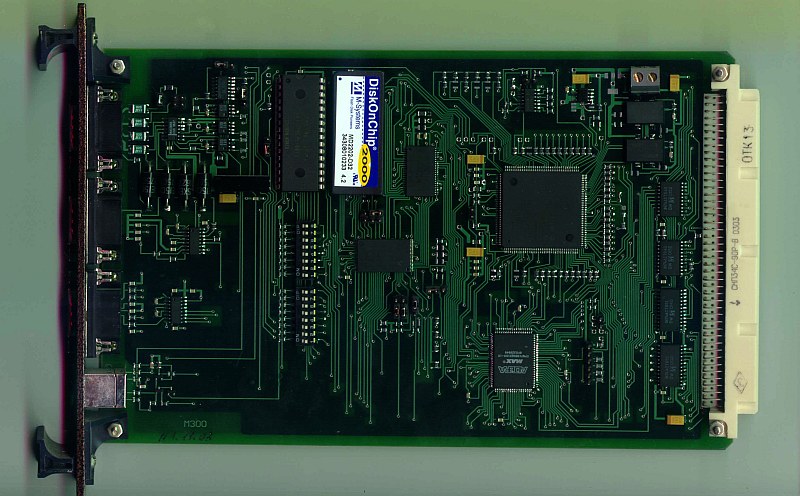
Основные технические характеристики :
- Процессор Am186CU с тактовой частотой 40МГц; разрядность процессора 16 бит; система команд: Х86; адресное пространство памяти: 1 Мбайт
- Распределение памяти:
- для монитора RAM 256Кх16(512Кбайт), ФЛЭШ 256Кх16(512Кбайт)
- для DOS RAM 256Kx16+128×8(640Kбайт), ФЛЭШ 128Кх16(256Кбайт)
- Адресное пространство ввода-вывода: 64 Кбайт
- Количество асинхронных последовательных портов: 2
- консольный порт (COM2) … RS-232
- сетевой порт (COM1) … RS-232/RS-485
- Порт USB
- Программное обеспечение:
- BIOS + встроенный монитор (обмен через консольный порт) встроенная операционная система ROM DOS, совместимая с MSDOS 6.22
- Тип устройства FLASH-диска:
- DiskOnChip 2000 MD2202-D32 емкостью 32Мбайт
2.3 Устройства (модули) связи с объектами (УСО)
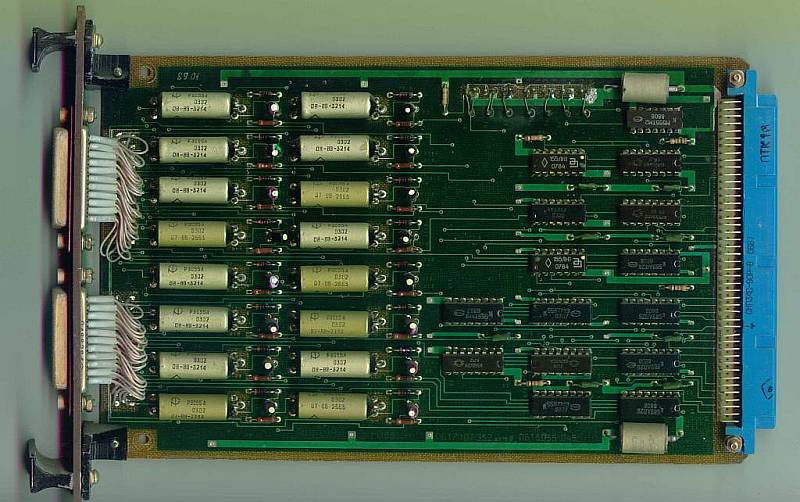
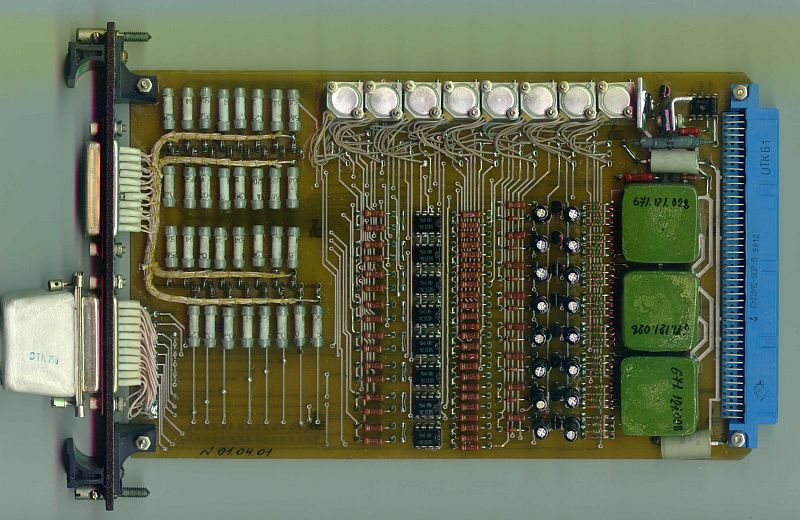
Используется для построения коммутаторов входных сигналов и выходных сигналов управления
Технические характеристики:
Число каналов вывода…………………………………………………………. 16
Тип реле………………………………………………………………………… РЭС55А
Напряжение питания модуля………………………………………………….. 5 В +/-5%
Потребляемая мощность не более……………………………………………. 10 ВТ
Конструкция модуля…………………………………………………………… одноплатная
Габаритные размеры…………………………………………………………… .262 X 175 X 20 мм
Масса не более…………………………………………………………………..0,6 КГ
Технические характеристики:
|
Используется для выдачи дискретных сигналов управления до 24 В 500 мА по 32-м линиям
Технические характеристики:
- Количество каналов цифрового вывода…………………………………32
- Тип выхода…………………………………………………………………»открытый коллектор»
- Выходной ток………………………………………………………………до 500 мА
- Выходной сигнал высокого уровня………………………………………+24 В ±10%
- Выходной сигнал низкого уровня………………………………………..не более +2,4В
- Гальваническая развязка выходных каналов от внутренних цепей
Используется для приёма дискретных сигналов по 32-м линиям. Сигналы (номинальный ток 10…20 мА) подаются на входы оптронов.
Технические характеристики:
- Количество каналов цифрового ввода………….………………………32
- Тип входа…………………………………………………………………оптрон
- Входной ток………………………………………………………………10 — 20 мА
- Входной сигнал высокого уровня………………………………………+24 В ±10%
- Входной сигнал низкого уровня………………………………………..не более +2,4В
- Гальваническая развязка входных каналов от внутренних цепей
Используется для выдачи дискретных сигналов управления до 24 В 500 мА по 32-м линиям
Технические характеристики:
- Количество каналов цифрового вывода…………………………………32
- Тип выхода…………………………………………………………………»открытый коллектор»
- Выходной ток………………………………………………………………до 500 мА
- Выходной сигнал высокого уровня………………………………………+24 В ±10%
- Выходной сигнал низкого уровня………………………………………..не более +2,4В
- Гальваническая развязка выходных каналов от внутренних цепей
Используется для приёма дискретных сигналов (включение / выключение переменного тока) по 32-м линиям. М237 по своему устройству и внешним контактам аналогичен модулю М201. Отличие от М201 заключается в способности принимать сигналы отрицательного напряжения, а также принимать дискретные сигналы переменного тока частотой более 50 Гц (производится выпрямление и сглаживание сигнала).
Технические характеристики:
- Количество каналов цифрового ввода………….………………………32
- Тип входа…………………………………………………………………оптрон
- Входной номинальный ток………………………………………………10 мА
- Входной сигнал высокого уровня (действующее значение)………….±24 В ±10%
- Входной сигнал низкого уровня (действующее значение)…………..не более ±2,4В
- Гальваническая развязка входных каналов от внутренних цепей
Модуль М233 является интеллектуальным и предназначен для управления БРДВ, который представляет сбой матрицу для приёма 256-ти дискретных сигналов типа «сухой контакт» (эти входы не требуют внешнего источника питания). М233 содержит микропроцессор, обеспечивающий сканирование входов БРДВ.
Технические характеристики:
- Тип микропроцессора: КР1816ВЕ35
- Период опроса всех входов БРДВ (256): 70 мс
- Объём внутренней памяти обеспечивает хранение состояния 256 входов
- Имеется гальваническая развязка входов от сигналов управления между М233 и БРДВ
- Удаление устройства БРДВ от модуля М233 (от каркаса модулей МПСУ) составляет от 5 до 10 м
- БРДВ имеет встроенный источник питания

Модуль М113 имеет двухплатную конструкцию, предназначен для измерения входных аналоговых сигналов в диапазоне от 40мВ до 10,24В, обладает небольшим временем преобразования и достаточной помехоустойчивостью.
Технические характеристики:
- Количество входных каналов измерения аналоговых сигналов……..8 дифференциальных
- Количество программируемых диапазонов входных сигналов……..9 (от ±40мВ до ±10,24В)
- Количество АЦП (при коммутации сигналов на входе)……………..1
- Время преобразования не более……………………………………….2мс
- Разрядность кода АЦП…………………………………………………16
- Погрешность преобразования………………………………………..0,1-0,3%
- Имеется гальваническая развязка между аналоговыми и цифровыми схемами модуля
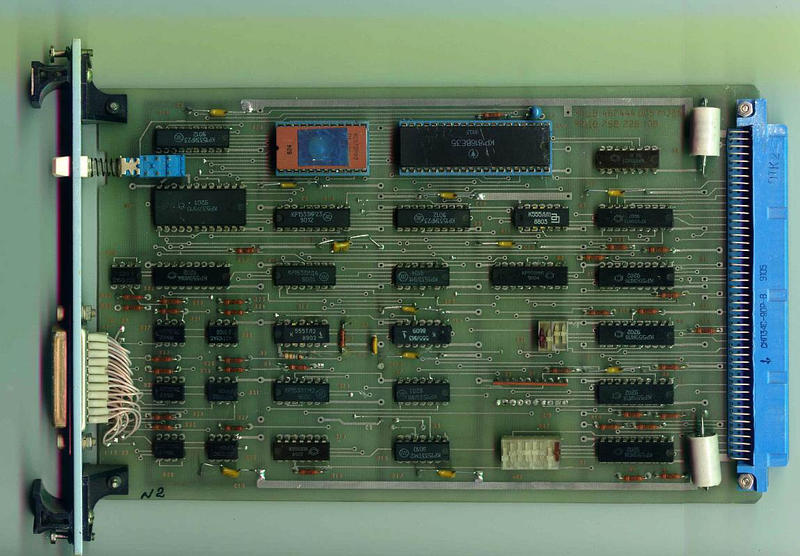
| Модуль М204 обладает малым временем преобразования входных аналоговых сигналов, предназначен для измерения (в том числе) быстро меняющихся сигналов.
Технические характеристики:
|
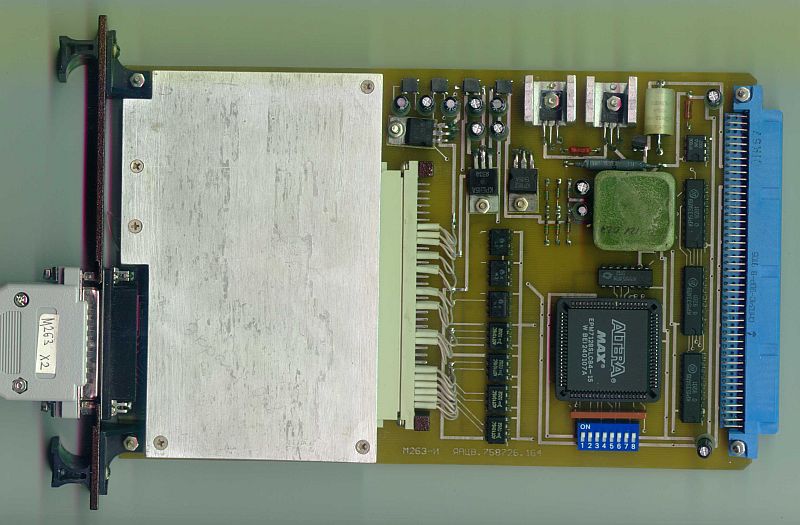
Это одноплатный аналог модуля М113, в большей степени ориентированный на работу вместе с модулем М244 при измерении температуры с датчиками ТСП и ТСМ
Технические характеристики:
- Полностью совпадают с характеристиками М113 за исключением количества диапазонов измерения, которых всего 4 (±40мВ; ±80мВ; ±160мВ; ±320мВ). Имеет также меньшую потребляемую мощность.
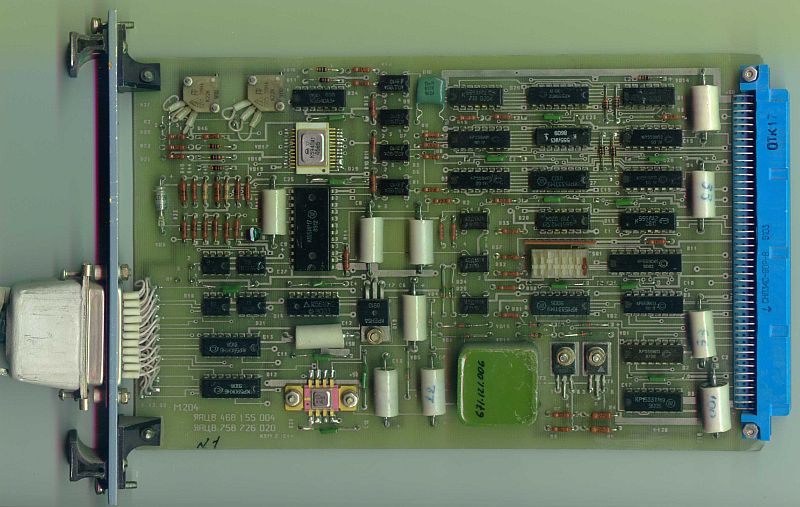
| Модуль М244 предназначен для формирования задающих токов подключаемых датчиков температуры типа ТСМ50, ТСМ100, ТСП50, ТСП100 по 8 каналам, компенсации смещения нуля при 0 С° и для последующей регистрации данных с помощью АЦП напряжения низкого уровня. М244 используется вместе с модулем М263 или М113
Технические характеристики:
|
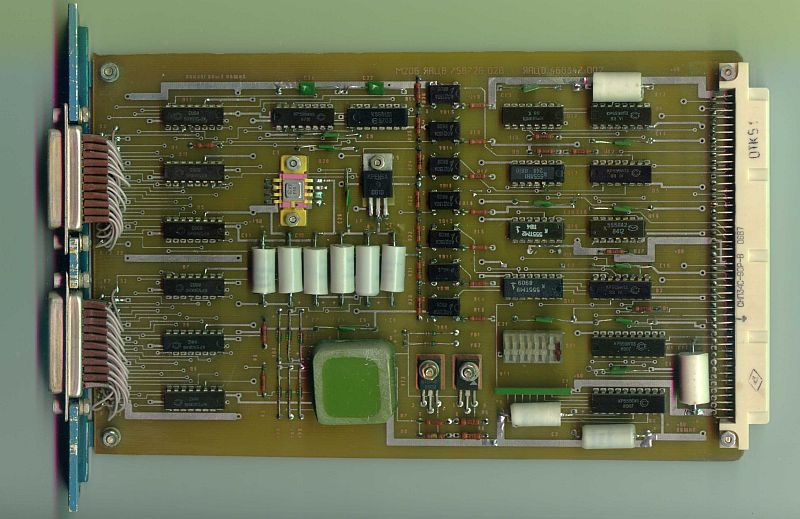
| Модуль М206 применяется для построения коммутаторов большого числа входных аналоговых сигналов на один вход модуля ввода аналоговых сигналов.
Технические характеристики:
|
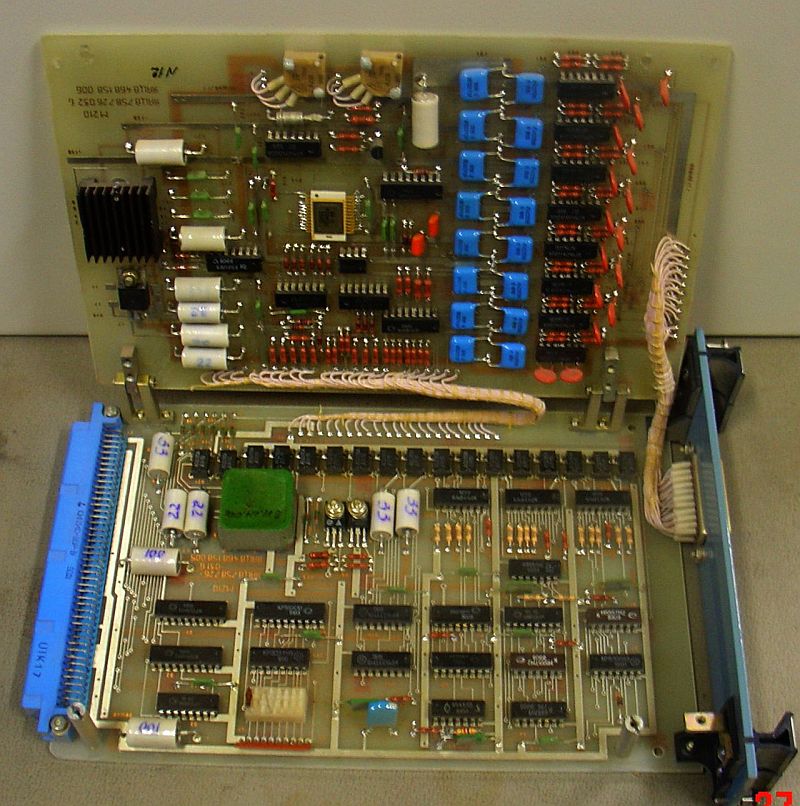
Модуль М210 применяется для аналогового регулирования, для управления различными приёмниками аналоговых сигналов. Конструкция двухплатная
Технические характеристики:
- Количество выходных каналов……………………………………..16 недифференциальных
- Разрядность входного кода АЦП……………………………………12
- Диапазон выходных аналоговых сигналов…………………+10,24В — минус 10,24В
- Погрешность преобразования при нагрузке 10 Ком………………0,2%
- Время преобразования не более…………………………………….200 мкс
- Сопротивление нагрузки не менее………………………………….2 КОм
- Количество ЦАП……………………………………………………..1
- Регенерируемое ОЗУ на 16 кодов ЦАП
- Имеется гальваническая развязка по цепям цифровых и аналоговых сигналов

Модуль М213 применяется как счётчик импульсов, генератор импульсов с заданными параметрами, источник импульсов внешнего системного таймера (при отключенном системном таймере контроллера МПСУ)
Технические характеристики:
- Количество входных каналов счёта импульсов……………………………3
- Разрядность счётчиков……………………………………………………….16
- Количество выходных каналов генератора импульсов…………………….3
- Длительность входных и выходных импульсов………………………от 2мкс до 67,1с
- Имеется генератор импульсов внешнего системного таймера
Модуль М230 применяется для счёта импульсов от множества (до 32-х) источников
Технические характеристики:
- Количество счётчиков………………………………………………………..32
- Разрядность кода числа импульсов…………………………………………16
- Тип входных цепей……………………………………………….»токовая петля 20 мА»
- Рекомендуемый уровень входных токов в каналах………………………..12 — 15 мА
- Частота входных импульсов не более……………………………………..160 Гц
Технические характеристики:
- Число каналов преобразования (вход и выход)……………………………….16
- Диапазон входных токов………………………………………………………..от 0 до 25 мА
- Диапазон выходных напряжений………………………………………………+10В…минус 10В
- Возможные коэффициенты преобразования……………………………..0,5 В/мА, 1 В/мА, 2В/мА
- Погрешность преобразования не более……………………………………….. 0,1%
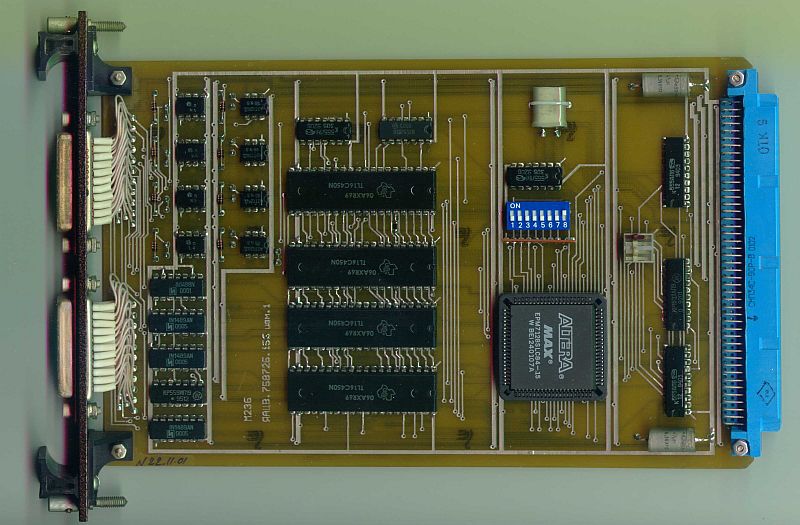
Модуль М236 является контроллером, управляющим четырьмя последовательными каналами. За счёт переключения перемычек может быть установлен интерфейс ИРПС (20 мА токовая петля) для всех 4-х каналов или интерфейс: 2 канала RS-232 и 2 канала ИРПС. Модуль имеет несколько модификаций: М243 управляет четырьмя каналами RS-232 с гальванической развязкой; М248 управляет двумя гальванически изолированными каналами RS-232, двумя гальванически изолированными каналами c интерфейсом RS-485 и одним каналом ИРПС.
Технические характеристики М236:
- Число каналов последовательного ввода/вывода…………………………………4
- Максимальная скорость передачи, бод……………………………………………115200
- Интерфейс ИРПС (20 мА токовая петля) в соответствии с НМ МПК по ВТ 10-78
- Параметры посылки RS-232 программируются
- Напряжение питания………………………………………………………………..5 ±0,1 В
- Ток потребления………………………………………………………………….. не более 0,5 А
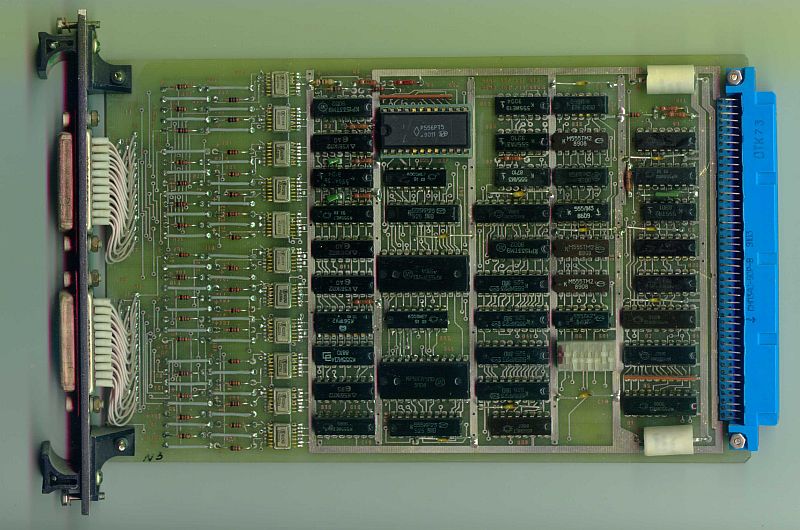
Технические характеристики:
- Число каналов последовательного ввода / вывода…….…………………………… 5
- Формат посылок интерфейсов RS-232, RS-485 программируется
- Максимальная скорость передачи по последовательному каналу, бод……..…….. 115200
- Напряжение источника питания……………………………………………………… 5 ±0,1 В
- Ток потребления………………………………………………………………….. не более 0,5 А
- Масса…………………………………………………………………….…….….. не более 0,4 кГ
| Для комплектования МПСУ имеется также ещё ряд модулей специального назначения (контроллеры интерфейсов, внешние ОЗУ и ПЗУ, контроллеры устройств, контроллеры ввода/вывода и так далее) |
3. Программное обеспечение
3.1 Непосредственное программирование МПСУ
- 3.1.1 Программа-монитор сопряжения между компьютером и МПСУ по специальному параллельному каналу с поддержкой работы в МПСУ операционной системы RT11 SJ и применяемых в ней систем программирования устройств с архитектурой DEC. Версии программы-монитора сопряжения по параллельному LPT каналу (однонаправленному для контроллера М252 и двунаправленному для контроллера М253, М254)
- 3.1.2 Программа-монитор обмена между ПЭВМ и МПСУ по последовательному каналу RS-232 / ИРПС
- 3.1.3 Система программирования МПСУ на основе языка QUASIC
- 3.1.4 Библиотека драйверов и тестов модулей УСО на языке MACRO-11
- 3.1.5 Технологическая система программирования МПСУ на основе языка релейно-функциональных схем (РФС)
- 3.1.6 Драйвер локальной радиальной сети МПСУ, построенной с помощью модулей связи по последовательным каналам (для ПЭВМ и МПСУ)
3.2 Система удаленного программирования МПСУ
- 3.2.1 Базовая версия с супервизором МПСУ uso24
- 3.2.2 Открытая версия с возможностью модификации пользователем (с «коротким» супервизором usosh )
- 3.2.3 Система удаленного программирования МПСУ с контроллером М260 на базе CPU MicroРС
3.3 Непосредственное программирование МПСУ
- 3.3.1 Использование программы-монитора сопряжения между компьютером и МПСУ по параллельному каналу для загрузки в МПСУ операционной системы RT11 SJ и программирование с применением систем и языков программирования, существующих в данной операционной системе.
- 3.3.2 Использование супервизора USOTM в контроллере МПСУ и резидентного драйвера управления каналами УСО в SCADA системе Trace Mode 4.1х, которые обеспечивают обмен данными между системой Trace Mode 4.1x фирмы AdAstra Research Group, Ltd и контроллером МПСУ
- 3.3.3 Использование супервизора USO24 в контроллере МПСУ и драйвера связи с МПСУ в SCADA системе «КРУГ-2000» компании НПФ «КРУГ» г. Пенза, которые обеспечивают сопряжение системы «КРУГ-2000» в компьютере с контроллером МПСУ
4. Программно-технические комплексы (ПТК), автоматизированные системы контроля (АСК) и диагностики (АСОД), устройства и приборы
Разработка и изготовление ПТК на базе МПСУ.
Программно-технические комплексы на базе МПСУ включают в себя различное оборудование и программное обеспечение. Разработка и изготовление ПТК производится в СКБ ВТ, в ряде случаев в кооперации с партнёрами.
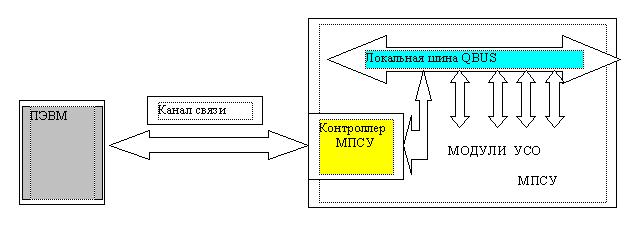
Управление МПСУ производится от ПЭВМ (компьютера) «верхнего» уровня. Применяется параллельный канал связи между компьютером и МПСУ (например, LPT). Дадим пояснения по данной схеме.
- 1) Компьютер (ПЭВМ) в различных вариантах использования предназначена для:
- хранения и загрузки в МПСУ операционной среды ОС RT11SJ,, а также средств разработки прикладных программ управления МПСУ в этой ОС
- хранения и загрузки прикладного программного обеспечения в МПСУ
- эмуляции функций дисплея для МПСУ
- 2) Контроллер МПСУ в различных вариантах может использоваться по-разному, а именно:
- исполняет программы в операционной системе RT-11SJ
- исполняет автономную (независимую от ОС) прикладную программу управления УСО из ПЗУ или предварительно загруженную в ОЗУ из ПЭВМ (или из «внешнего» РПЗУ)
Способы программирования данного ПТК ориентированы на разработку программ в операционной системе RT-11SJ. Они часто дают требуемый результат, то есть работающую эффективную систему, правда, при весьма скромных средствах отображения результатов и командах оператора по управлению системой, не предполагающих наличие графики.
1) Программы на языке Macro-11
Прикладная программа может быть написана, в принципе, на любом языке, который имеет транслятор и линковщик в RT-11SJ (MACROASSEMBLER, FORTRAN, PASCAL, C), а также средства непосредственного обращения к регистрам внешних устройств, и может обрабатывать аппаратные прерывания. Однако на практике чаще всего из этих языков используется MACROASSEMBLER, то есть, одна из версий Ассемблера, предназначенная для RT-11SJ, и которая хорошо документирована в комплекте документации на ОС РАФОС. Программист самостоятельно «разбирается» с программными интерфейсами всех необходимых модулей УСО, так как RT-11SJ их «не знает».
2) Программы на языке QUASIC
Специальная модификация системы программирования на базе этого языка разработана в СКБ ВТ применительно к программированию модулей УСО (МПСУ), имеет специальные библиотеки обращения к УСО.
Прикладная программа может быть предназначена для работы в ОС RT-11SJ. Тогда перед пуском программы сначала в МПСУ загружается и запускается операционная система RT-11SJ, которая должна работать в течение всего времени работы такой прикладной программы пользователя. Прикладная программа в МПСУ может быть независимой от операционной системы. В этом случае она может запускаться из ПЗУ контроллера МПСУ или предварительно загружаться в его ОЗУ из компьютера по каналу связи. При работе программы в МПСУ без поддержки ОС RT-11SJ можно использовать последовательный канал связи между компьютером и МПСУ.
1) Устройство автоматически регистрирует действующее значение токов, временные параметры импульсов кодовых посылок АЛС, а также факт изменения порядка следования импульсов АЛСН
2) УПН-АЛС может использоваться при пуско-наладочных, профилактических работах по содержанию путевой кодообразующей аппаратуры АЛСН в качестве высокопроизводительного и объективного средства контроля состояния участков пути, а также для целей прогнозирования изменений, архивирования данных и составления отчетной документации
3) Объем энергонезависимой памяти УПН-АЛС рассчитан на непрерывную работу в режиме записи данных в течение 24…29 часов (в зависимости от интенсивности смены порядка следования импульсов АЛС)
4) Исполнение УПН-АЛС — МПСУ в виде переносного прибора. Связь с компьютером (в лаборатории) осуществляется по последовательному каналу.
Программное обеспечение состоит из двух компонент: программы УПН-АЛС (работает в ПЗУ контроллера МПСУ) и программы обработки данных УПН-АЛС и отображения параметров числового кода АЛС в рельсовых цепях, которая предназначена для компьютерной обработки и визуального отображения на экране компьютера информации, считываемой из УПН-АЛС. Программа обработки данных УПН-АЛС в компьютере работает в ОС Windows и выполняет все необходимые функции по приёму и обработке данных, в том числе обеспечивает просмотр в окне графического монитора временных диаграмм токового сигнала и графика действующего значения тока. В процессе просмотра обеспечиваются различные возможности по управлению просмотром графического изображения.
- ВНИИЖТ МПС РФ, 1999 г. «Техническое описание ТУМС и рекомендации по сопряжению с устройствами электрической централизации».
- ВНИИУП МПС РФ, 2001 г. «Комплекс микропроцессорных систем телеуправления (МСТУ) маршрутами на станциях (интегрированная система ДЦ, ЭЦ, МАЛС)»
СКБ ВТ разработало и изготавливает аппаратные средства (стойки) ТУМС и МСТУ по заказу МПС РФ. Аппаратура размещается в закрытом шкафу (стойке), который обеспечивает выполнение требований класса размещения К1 согласно ОСТ 32.146-2000 по климатическому воздействию и класса размещения МС1 по ОСТ 32.146-2000 в части устойчивости к воздействию механических факторов и прочности конструкции. МСТУ является модернизацией ТУМС.
Главным элементом ПТК «Круг-2000» является SCADA система «КРУГ-2000» для WINDOWS NT. Данная система разработана в компании НПФ «КРУГ», г. Пенза (Научно-Производственная фирма «КРУГ», http://www.krug2000.ru/). На указанном сайте имеется полная информация по ПТК «Круг-2000».
ПТК МПСУ / КРУГ2000 с ПК МПСУ может применяться для создания систем АСУТП, в которых обеспечена реализация всех возможностей системы «Круг-2000» для Windows NT, а МПСУиспользуется наряду с любым другим контроллером нижнего уровня из большого перечня контроллеров, «встроенных» в систему.
Связь между уровнем компьютеров (станций оператора, локальной сетью станций, серверов) и уровнем контроллеров осуществляется по последовательному каналу и поддерживается специальными программными средствами (эмулятор ЭИУСО и драйвер МПСУ).
Программа эмулятора интеллектуального УСО (ЭИУСО) предназначена для организации связи УСО различных типов с системой «Круг-2000» через подключаемые драйверы, она обеспечивает стандартный интерфейс с системой при использовании различных контроллеров.
Драйвер контроллера МПСУ предназначен для организации связи между ПК МПСУ и ЭИУСО и обмена текущими значениями данных и диагностических признаков между базой данных ЭИУСО и МПСУ. Драйвер контроллера МПСУ имеет следующие характеристики: физический канал связи — последовательный порт COM1…4 (первая версия драйвера — для одного канала); поддерживает спецификацию «Протокола обмена МПСУ» для контроллеров типа М231,М251…М255; поддерживает модули М201,М203,М204,М210 (дискретные и аналоговые входы / выходы).
В соответствии с Договором о стратегическом партнёрстве компания НПФ «Круг» готова выполнить модернизацию драйвера контроллера МПСУ при необходимости расширения его характеристик (для конкретной АСУТП с применением данного ПТК).
Главной составляющей ПТК является SCADA система Трейс Моуд 5.ХХ для WINDOWS (9х, NT). Данная система разработана и поставляется компанией AdAstra Research Group, Ltd. . ПК МПСУ может применяться для создания систем АСУТП, в которых обеспечена реализация всех возможностей SCADA системы Трейс Моуд 5.ХХ, а МПСУ используется наряду с любым другим контроллером из большого перечня контроллеров, «встроенных» в систему.
Связь между уровнем компьютеров (станций оператора, локальной сетью станций, серверов разного назначения) и уровнем контроллеров осуществляется по последовательному или параллельному каналу связи и поддерживается специально разработанным в СКБ ВТ OPC — сервером МПСУ.
OPC-сервер МПСУ
OPC (OLE for Process Control) — новый интерфейсный стандарт, основанный на DCOM и поддерживаемый Международным Фондом OPC (OPC Foundation). В состав TRACE MODE 5.03 включен OPC-сервер для Profibus и контроллеров Simatic, которые разработаны фирмой SIEMENS. СКБ ВТ полностью согласен с утверждением, что любой выпускаемый промышленный контроллер должен иметь свой OPC-сервер, поскольку OPC стандартизирует интерфейс между SCADA-системой и контроллером (а также УСО, другими системами и приложениями). Широкое применение OPC избавляет пользователей SCADA-систем от проблем с необходимостью разрабатывать драйвера.
В СКБ ВТ в 2002 году разработан OPC-сервер МПСУ, отлажен и протестирован применительно к системе TRACE MODE 5.03 (для ОС Windows NT). OPC-сервер МПСУ имеет следующие характеристики: физический канал связи — любой из 4-х последовательных портов COM1…4, специальный параллельный канал, параллельный LPT-канал (к компьютеру с OPC-сервером можно подключить несколько МПСУ); поддерживает спецификацию «Протокола обмена МПСУ» для контроллеров типа М231,М251…М255; поддерживает модули УСО М101,М102,М103,М113,М201,М202,М203,М204,М210 (дискретные и аналоговые входы / выходы), а также «модуль» программы пользователя в контроллере МПСУ. Для пользователя разработана также программа настройки OPC-сервера. Определение состава модулей УСО в ПК МПСУ (ресурсов) производится автоматически.
5. АСУТП и прочие системы, включающие контроллеры СКБ ВТ
В этом разделе даются ссылки на информацию (она размещена на сайте СКБ ВТ) о различных автоматизированных системах, установках, приборах и так далее, которые созданы с применением микропроцессорных контроллеров, разработанных и произведённых в СКБ ВТ. Большинство из представленных систем созданы и внедрены нашими партнёрами, другие системы разработаны и внедрены специалистами СКБ ВТ, часть систем являются результатом совместной работы.
5.1 Производственные установки сушки и грануляции
Разработаны НПП «Инструмент» (г. Йошкар Ола) совместно с Марийским государственным техническим университетом (МарГТУ). Первые установки внедрены на Кировоградском заводе твёрдых сплавов (Свердловская обл., г. Кировоград).
5.2 Модернизированная система телеметрии на Псковском мелькомбинате
Модернизированная система телеметрии на Псковском мелькомбинате создана СКБ ВТ совместно со специалистами мелькомбината и предназначена для автоматической телеметрии, то есть измерения температуры в силосах, заполненных зерном.
5.3 Система телеуправления ТУМС для железной дороги
Система телеуправления ТУМС создана на базе стойки ТУМС, которая разработана, производится в СКБ ВТ и поставляется на станции железной дороги, являясь основой аппаратного обеспечения внедряемых нашими партнёрами систем.
5.4 Система микропроцессорного управления МСТУ для железной дороги
Система микропроцессорного контроля и телеуправления маршрутами на железнодорожных станциях создана на базе исполнительного контроллера МСТУ ИК (стойки МСТУ). Стойка контроллера МСТУ ИК разработана, производится в СКБ ВТ и поставляется нашим партнёрам для комплектования и внедрения систем МСТУ на станция железной дороги МПС РФ. По сравнению с системами ТУМС обладает повышенными функциями и возможностями для подключения внешней аппаратуры.
5.5 Модернизация аппаратного обеспечения САП управляющих программ для инструментального цеха
В 2001 году СКБ ВТ выполнило модернизацию системы автоматизированной подготовки управляющих программ (САП УП) для инструментального цеха предприятия, (Псковского завода радиодеталей) путём замены компьютеров типа ДВК на промышленные контроллеры МПСУ и компьютеры
5.6 Система управления установкой компаундирования конденсаторов
Система управления установкой (автоматом) компаундирования на Псковском заводе радиодеталей создана специалистами СКБ ВТ при техническом содействии персонала цеха по производству керамических конденсаторов, где на период внедрения (2006-2007 годы) эксплуатируются две установки компаундирования. Внедрённая система управления заменила прежнюю устаревшую систему.